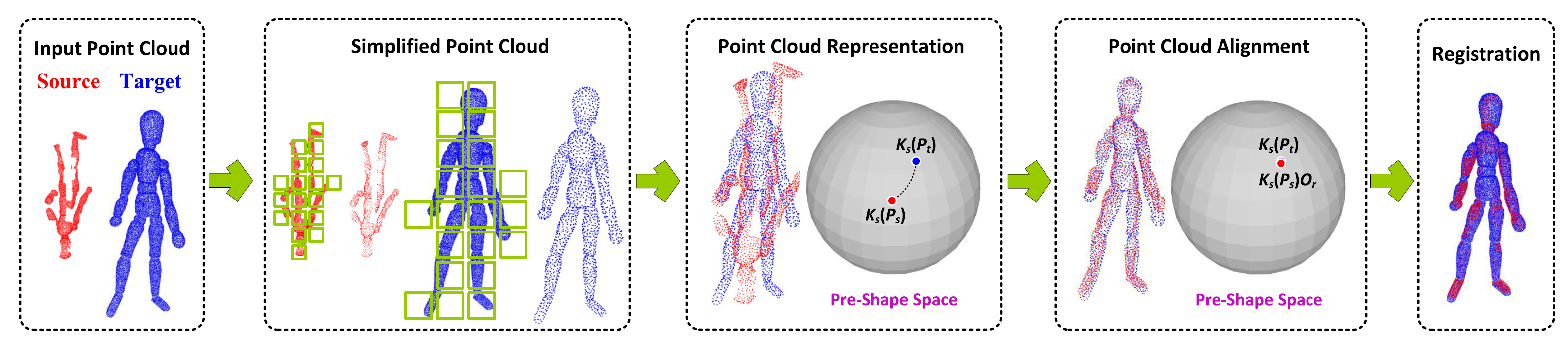
The pipeline of our registration method. |
[News! Oct 16, 2023] A new peoject PKSS-Align is upload on Github. Link: [PKSS-Align]
[Mar 16, 2023] A new peoject is activated for further improvement.
[Feb 9, 2023] The paper is accepted by IEEE Transactions on Image Processing.
[Nov 12, 2021] The paper is submitted into IEEE Transactions on Image Processing.
[Jun 12, 2021] The project is activated.
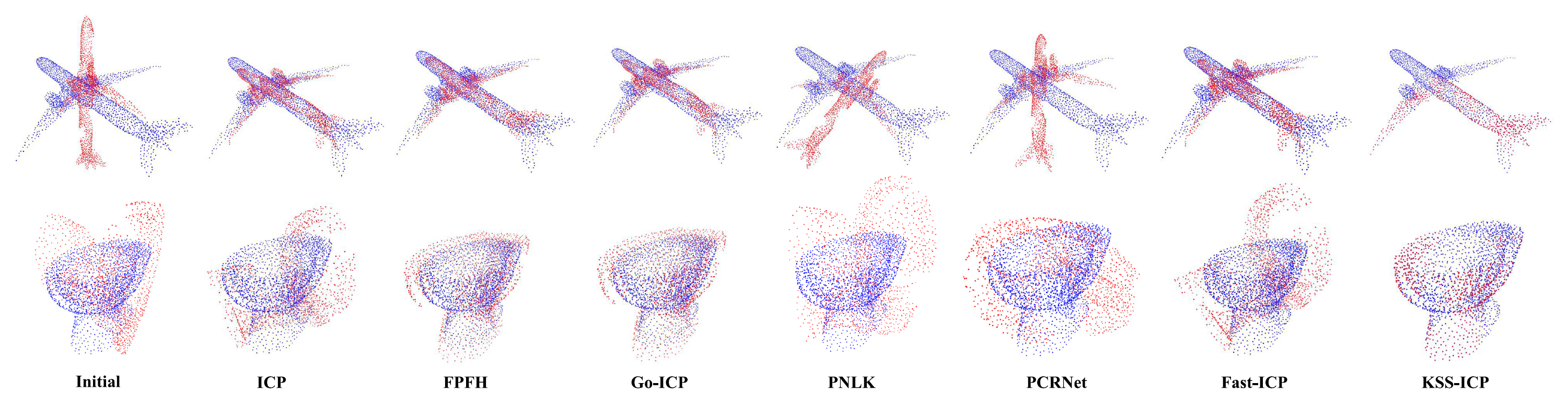
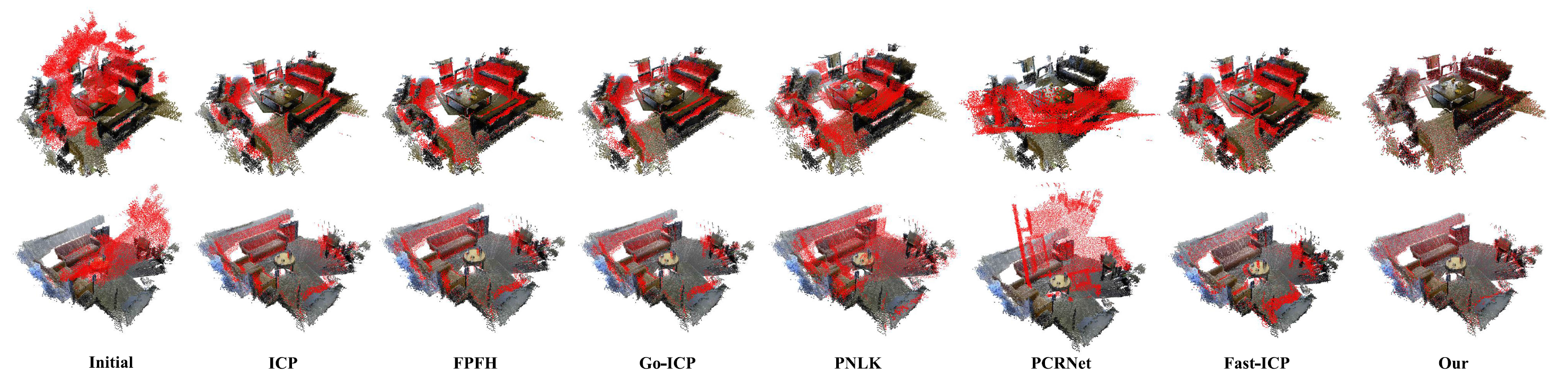
Point cloud registration is a popular topic that has been widely used in 3D model reconstruction, location, and retrieval. In this paper, we propose a new registration method, KSS-ICP, to address the rigid registration task in Kendall shape space (KSS) with Iterative Closest Point (ICP). The KSS is a quotient space that removes influences of translations, scales, and rotations for shape feature-based analysis. Such influences can be concluded as the similarity transformations that do not change the shape feature. The point cloud representation in KSS is invariant to similarity transformations. We utilize such property to design the KSS-ICP for point cloud registration. To tackle the difficulty to achieve the KSS representation in general, the proposed KSS-ICP formulates a practical solution that does not require complex feature analysis, data training, and optimization. With a simple implementation, KSS-ICP achieves more accurate registration from point clouds. It is robust to similarity transformation, non-uniform density, noise, and defective parts. Experiments show that KSS-ICP has better performance than the state-of-the-art.

[1] Lv C, Lin W, Zhao B. KSS-ICP: Point Cloud Registration Based on Kendall Shape Space[J]. IEEE Transactions on Image Processing, 2023, 32: 1681-1693.
Bib:
@article{Lv2023kss,
title={KSS-ICP: Point Cloud Registration Based on Kendall Shape Space},
author={Lv, Chenlei and Lin, Weisi and Zhao, Baoquan},
journal={IEEE Transactions on Image Processing},
volume={32},
pages={1681--1693},
year={2023},
publisher={IEEE}
}
This research is supported by the Ministry of Education, Singapore.